Flash programming of AT89 microcontrollers using ISP adapter
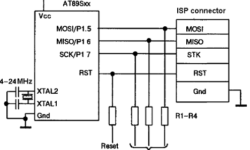
Microcontrollers family AT89C has a parallel programming interface of flash memory. To write information, we need to supply programming voltage +12V, and for controlling, almost all pins of ports are used. This is why parallel programming is done in special devices – programmers. Microcontrollers AT89S, besides parallel programming ability, have ISP programming ability. Using the Serial programming interface doesn’t need +12V of programming voltage because the inside interface is voltage converter included.