Simple dummy load for basic testing
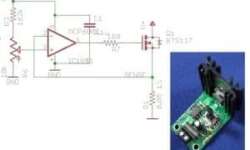
I bet you face many problems in the design process where you need to test the power supply or LED by providing/drawing constant current regardless of voltage change. Such a device is called a dummy load. You can find lots of DIY dummy load projects, and we won’t be talking about commercial ones right now. Nick found out that most DIY dummy loads tend to be complicated or unavailable. So without struggling, he decided to start his own simple and reliable load. He wanted it to be simple, self-powered, and indestructible. Indestructible means that it won’t burn in a voltage range up to 30V. With BTS141 FET this became possible as it has built-in over-current and over-voltage protection built-in. Controlling is done with a simple potentiometer attached to operational amplifier positive input. Negative input is connected to the current sense resistor. The project is OSHW which can be found on Github as re:load. [source]