Wavelet transform – the basics
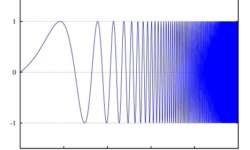
Recently I’ve been reviewing wavelet transform. I think some points are worth sharing. In this first post, I would like to mention the basics of wavelet transform and its main features. A probably most important question that comes to mind is why we need another transform when we already have Fourier transform. The answer lies in the signals that we want to analyze. If we take any periodic signal that is stationary (e.g., Pulse train) then Fourier transform is the right tool because its frequency components don’t change in time. Let’s take another case when the signal changes in time (chirp signal). Classical Fourier transform cannot determine frequency components of such signal because it doesn’t carry any information about signal time scale. Of course, it is possible to cheat with Short Time Fourier Transform (STFT) when the signal is analyzed in short chunks, but again there is a problem of resolution – the shorter chunks give better time resolution, and longer – better frequency resolution. You can find more info on this by looking for Heisenberg’s Uncertainty Principle. So there is always a tradeoff between both. A fundamental limitation of Fourier transform is in its base function, which is a…