Everything You Need to Know About Protein Denaturation
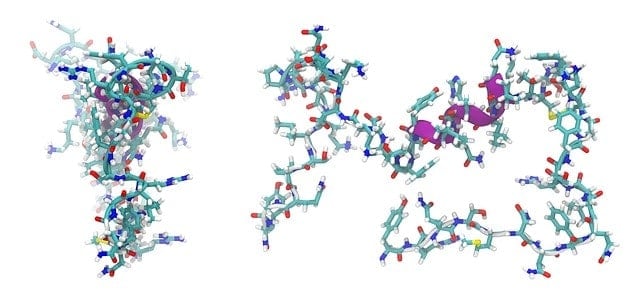
Most proteins become functional once they acquire their native three-dimensional structure, which is dictated by the primary amino acid sequence of the protein. Denaturation is when proteins, or more specifically, nucleic acids, lose their three-dimensional structure. The occurrence of denaturation can be due to many external factors; subsequently, this event can irreversibly disrupt the protein’s functionality1. Forces Involved in Protein Stability In the cell, linear polypeptides are synthesized from a sequence of mRNA through a process known as translation. As the polypeptide is synthesized, it begins to fold into its three-dimensional structure in a process known as protein folding. The secondary structure, which includes the alpha helices and beta sheets, is stabilized by intramolecular hydrogen bonds between the amide hydrogen and carbonyl oxygen of the peptide bond that links the amino acids of the primary structure. Interactions between side chains of amino acids that comprise the protein determine the tertiary structure. The structure is firmly maintained due to the strength of hydrophobic interactions and the disulfide that bridges the cysteine residues of the amino acids.