Radio Frequency Identification RFID
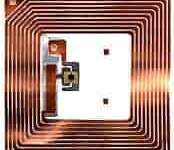
There are two types of RFID devices: Active and Passive. Active devices have a power source built-in, which supplies the transmitter. The transmitter is triggered by sending the signal to an RFID device. These devices have their own code and can transmit signals in desired time intervals. Active RFID devices are good in defining locations of objects or sending some information about a particular place (RFID-based location determination). Active RFID devices use high frequencies (455MHz, 2,45GHz, or 5,8GHz) – working range about 20 – 100 meters. The most common are passive RFID. They don’t need a power source. Passive RFID devices are low frequency(124 – 135kHz – low) and high(13,56MHz – 960KHz – high; 2,45GHz – UHF). The working principle of low and high-frequency devices differ. Simultaneously, low-frequency readers generate a magnetic field that induces a current in the RFID device antenna. The chip inside the RFID device modifies this magnetic field, which is reread by the reader. The working distance of such a device is about 35cm.