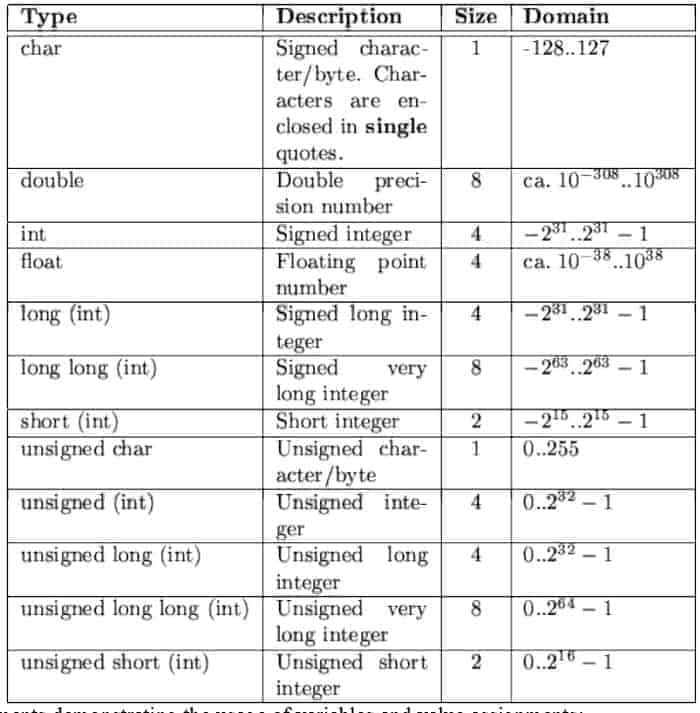
The main thing that microcontrollers does is operates with data. Microcontrollers do four main operations: adds, abstracts, multiplies, and divides (+,-,*,/). division can be split into the division “/” and modulus operation “%.” For instance, i1/i2 is an integer division. Another part of the operators is Relation operators. They are used for boolean conditions and expressions. Expressions with these operators return true or false values. Zero is taken as false and non zero value as true. Operators may be as follows: <, <=, > >=, ==, !=. The priority of the first four operators is higher than that of the latter two operators. These operators are used in relational expressions such as: Note that the equality operator is == and not =. ‘=’ is an assignment operator. If you want to compare a and b for equality, then you should write a == b, not a = b because a = b means you are assigning the value of b to a, as shown in.
Continue reading