Use neural sensors to build smart sensor systems using microcontrollers
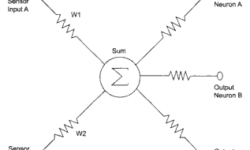
Neural networks are a broad topic. But this small example demonstrates how to create a primary neural sensor that takes resistive readings from multiple sensors and multiply it by weight factor and then sum the results. Results are compared to a three-level threshold. Without going too deep into neural networks, we can say that neural cell thresholds are similar to natural biological neurons. For instance, pain levels: itch is a low pain level while burning sensations are combined with cold and warm feelings. Neural sensors can operate in the same way. Let’s take typical neural sensors, which consist of two inputs with some weights and three outputs. Depending on the threshold level that the sum of inputs gives – we have an output signal on three outputs.