Fractal antenna constructions
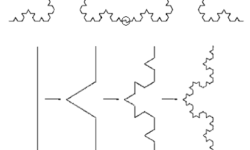
Among the usual antennas used in today’s data transfer, different types of antennas are used. First publications about electrodynamic characteristics of fractal structures were published in the 1980s, but the first practical approach appeared after 10 years. Dr. Nathan Cohen, professor of Boston University, designed, engineered, and patented many practical fractal antenna solutions and founded “Fractal Antenna Systems” in 1995. Van Koch fractal antenna As Nathan states, there were forbidden to use external antennas in the city in the center of Boston. Hence, he managed to hide the antenna within the design of an amateur radio station. He took aluminum foil and made an antenna as decoration according to Van Koch figure: